
Motor de motocicleta eléctrica
1. ¿Qué es un motor?
1.1 El motor es un componente que convierte la energía de la batería en energía mecánica para conducir las ruedas de un vehículo eléctrico para girar
●La forma más simple de comprender el poder es conocer primero la definición de W, W = potencia, es decir, la cantidad de potencia consumida por unidad de tiempo, y las 48V, 60 V y 72V de la que a menudo hablamos es la cantidad total de potencia consumida, por lo que cuanto mayor sea la batería, más potencia consumida en el mismo tiempo, y mayor es la potencia del vehículo (bajo las mismas condiciones)
●Tome 400W, 800W, 1200W, por ejemplo, con la misma configuración, batería y 48 voltaje:
En primer lugar, bajo el mismo tiempo de conducción, el vehículo eléctrico equipado con un motor de 400 W tendrá un rango más largo, porque la corriente de salida es pequeña (la corriente de conducción es pequeña), la velocidad total del consumo de energía es pequeña.
El segundo es 800W y 1200W. En términos de velocidad y energía, los vehículos eléctricos equipados con motores de 1200 W son más rápidos y más potentes. Esto se debe a que cuanto mayor sea la potencia, mayor será la velocidad y la cantidad total de consumo de energía, pero al mismo tiempo la duración de la batería será más corta.
●Por lo tanto, bajo el mismo número y configuración V, la diferencia entre los vehículos eléctricos 400W, 800W y 1200W está en potencia y velocidad.Cuanto mayor sea la potencia, más fuerte es la potencia, más rápida es la velocidad, más rápido es el consumo de energía y más corto es el kilometraje. Sin embargo, esto no significa que cuanto mayor sea la potencia, mejor será el vehículo eléctrico. Todavía depende de las necesidades reales de sí mismo o del cliente.
1.2 Los tipos de motores de vehículos eléctricos de dos ruedas se dividen principalmente en: motores de cubo (comúnmente utilizados), motores montados en medio (raramente utilizados, divididos por tipo de vehículo)

Motocicleta eléctrica motor ordinario

Motocicleta eléctrica Motor montado en medio
1.2.1 La estructura del motor del cubo de la rueda se divide principalmente en:motor de CC cepillado(básicamente no usado),motor de CC sin escobillas(BLDC),motor síncrono de imán permanente(PMSM)
La principal diferencia: si hay cepillos (electrodos)
●Motor de CC sin escobillas (BLDC)(comúnmente usado),motor síncrono de imán permanente(PMSM) (rara vez usado en vehículos de dos ruedas)
● La principal diferencia: los dos tienen estructuras similares, y los siguientes puntos pueden usarse para distinguirlas:
Motor de CC sin escobillas
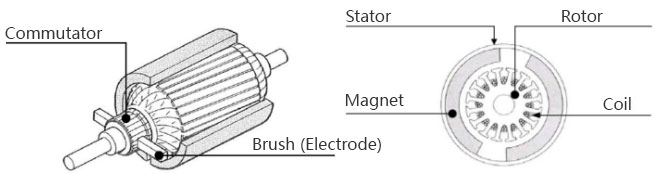
Motor de CC cepillado (convertir el CA en DC se llama conmutador)
●Motor de CC sin escobillas (BLDC)(comúnmente usado),motor síncrono de imán permanente(PMSM) (rara vez usado en vehículos de dos ruedas)
● La principal diferencia: los dos tienen estructuras similares, y los siguientes puntos pueden usarse para distinguirlas:
| Proyecto | Motor síncrono de imán permanente | Motor de CC sin escobillas |
| Precio | Caro | Barato |
| Ruido | Bajo | Alto |
| Rendimiento y eficiencia, par | Alto | Bajo, ligeramente inferior |
| Precio del controlador y especificaciones de control | Alto | Bajo, relativamente simple |
| Pulsación de par (idiota de aceleración) | Bajo | Alto |
| Solicitud | Modelos de alta gama | De rango medio |
● No hay regulación sobre cuál es mejor entre el motor sincrónico de imán permanente y el motor de CC sin escobillas, depende principalmente de las necesidades reales del usuario o del cliente.
● Los motores de Hub se dividen en:Motores ordinarios, motores de baldosas, motores refrigerados por agua, motores refrigerados por líquidos y motores refrigerados al aceite.
●Motor ordinario:motor convencional
●Los motores de mosaico se dividen en: 2da/3a/4ª/5ª Generación, Los motores de mosaicos de quinta generación son los más carosEl precio del mercado de Motor Motor Transit de 5000W de 5.W Generation Transit es de 2500 yuanes, otras marcas son relativamente más baratas.
(El motor de mosaico electrochado tiene una mejor apariencia)
●Motores refrigerados por agua/refrigerados por líquido/aceiteTodos agregan aislamientolíquido en el interiorel motor para lograrenfriamientoefecto y extender elvidadel motor. La tecnología actual no es muy madura y es propensa afugay fracaso.
1.2.2 Motor medio: mediano no engranaje, manejo directo medio, cadena media/correa
Motor ordinario

Motor ordinario

Motor refrigerado por líquido
Motor enfriado por aceite
● Comparación entre el motor del cubo y el motor montado en medio
● La mayoría de los modelos en el mercado usan motores Hub y los motores montados en medio son menos utilizados. Se divide principalmente por modelo y estructura. Si desea cambiar la motocicleta eléctrica convencional con motor de cubo a un motor montado en la mitad, debe cambiar muchos lugares, principalmente el marco y el horquilla plana, y el precio será costoso.
| Proyecto | Motor de centro convencional | Motor de montaje en medio |
| Precio | Barato, moderado | Caro |
| Estabilidad | Moderado | Alto |
| Eficiencia y escalada | Moderado | Alto |
| Control | Moderado | Alto |
| Instalación y estructura | Simple | Complejo |
| Ruido | Moderado | Relativamente grande |
| Costo de mantenimiento | Barato, moderado | Alto |
| Solicitud | Propósito general convencional | De alta gama/requiere alta velocidad, escalada, etc. |
| Para los motores de las mismas especificaciones, la velocidad y la potencia del motor montado en medio serán más altas que la del motor del cubo ordinario, pero similar al motor del cubo de mosaico. | ||


2. Varios parámetros y especificaciones comunes de motores
Varios parámetros y especificaciones comunes de motores: voltios, potencia, tamaño, tamaño del núcleo del estator, altura del imán, velocidad, par, ejemplo: 72v10 pulgadas 215C40 720R-2000W
● 72V es el voltaje del motor, que es consistente con el voltaje del controlador de la batería. Cuanto mayor sea el voltaje básico, más rápida será la velocidad del vehículo.
● 2000W es la potencia nominal del motor. Hay tres tipos de potencia,a saber, potencia clasificada, potencia máxima y potencia máxima.
La potencia nominal es la potencia que el motor puede funcionar para unmucho tiempobajovoltaje nominal.
La potencia máxima es la potencia que el motor puede ejecutar para unmucho tiempobajovoltaje nominal. Es 1.15 veces la potencia nominal.
La potencia máxima es lapotencia máximaque elLa fuente de alimentación puede alcanzar en poco tiempo. Por lo general, solo puede durar sobre30 segundos. Es 1.4 veces, 1.5 veces o 1.6 veces la potencia nominal (si la fábrica no puede proporcionar potencia máxima, se puede calcular como 1.4 veces) 2000W × 1.4 veces = 2800W
● 215 es el tamaño del núcleo del estator. Cuanto mayor sea el tamaño, mayor es la corriente que puede pasar, y mayor será la potencia de salida del motor. Convencional de 10 pulgadas utiliza 213 (motor de múltiples alambres) y 215 (motor de un solo alambre), y 12 pulgadas es 260; Los triciclos de ocio eléctricos y otros triciclos eléctricos no tienen esta especificación, y usan motores del eje trasero.
● C40 es la altura del imán, y C es la abreviatura del imán. También está representado por 40h en el mercado. Cuanto más grande sea el imán, mayor es la potencia y el par, y mejor será el rendimiento de aceleración.
● El imán de un motor convencional de 350W es de 18 h, 400W es 22h, 500W-650W es 24H, 650W-800W es 27 h, 1000W es 30 h y 1200W es 30h-35h. 1500W es 35H-40H, 2000W es 40H, 3000W es 40H-45H, etc. Dado que los requisitos de configuración de cada automóvil son diferentes, todo está sujeto a la situación real.
● 720R es la velocidad, la unidad esrpm, la velocidad determina qué tan rápido puede ir un automóvil, y se usa con un controlador.
● Torque, la unidad es n · m, determina la escalada y la potencia de un automóvil. Cuanto mayor sea el par, más fuerte es la escalada y el poder.
La velocidad y el par son inversamente proporcionales entre sí. Cuanto más rápida sea la velocidad (velocidad del vehículo), menor será el par, y viceversa.
Cómo calcular la velocidad:Por ejemplo, la velocidad del motor es de 720 rpm (habrá una fluctuación de aproximadamente 20 rpm), la circunferencia de un neumático de 10 pulgadas de un vehículo eléctrico general es de 1.3 metros (puede calcularse en función de los datos), la relación sobre velocidad del controlador es del 110%(la relación sobre la velocidad del controlador es generalmente 110%-115%)
La fórmula de referencia para la velocidad de dos ruedas es:Velocidad*Relación del controlador sobre velocidad*60 minutos*Circunferencia del neumático, es decir, (720*110%)*60*1.3 = 61.776, que se convierte en 61 km/h. Con la carga, la velocidad después del aterrizaje es de aproximadamente 57 km/h (aproximadamente 3-5 km/h menos) (la velocidad se calcula en minutos, por lo que 60 minutos por hora), por lo que la fórmula conocida también se puede usar para revertir la velocidad.
El torque, en N · m, determina la capacidad de escalada y la potencia de un vehículo. Cuanto mayor sea el par, mayor es la capacidad de escalada y el poder.
Por ejemplo:
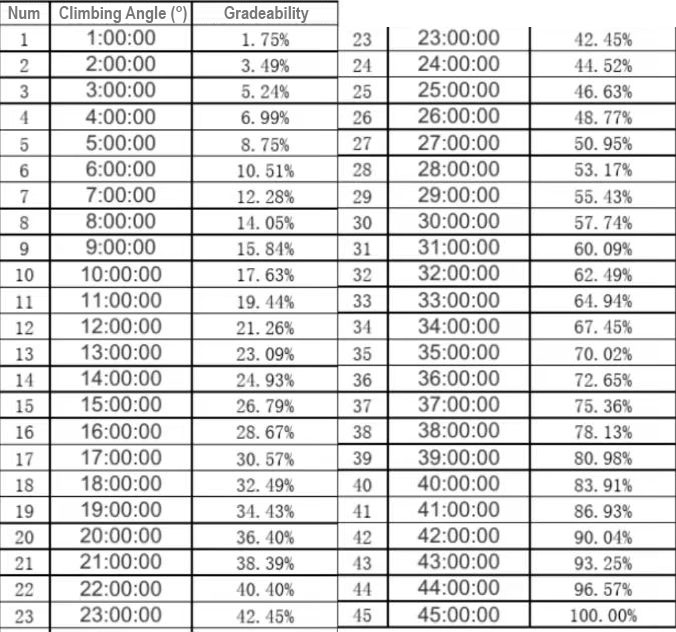
● 72V12 pulgadas 2000W/260/C35/750 RPM/Torque 127, velocidad máxima 60 km/h, pendiente de escalada de dos personas de aproximadamente 17 grados.
● Necesita que coincida con el controlador correspondiente y se recomienda la batería de litio de batería de gran capacidad.
● 72V10 pulgadas 2000W/215/C40/720 RPM/Torque 125, velocidad máxima 60 km/h, pendiente de escalada de aproximadamente 15 grados.
● 72V12 pulgadas 3000W/260/C40/950 RPM/Torque 136, velocidad máxima 70 km/h, pendiente de escalada de aproximadamente 20 grados.
● Necesita que coincida con el controlador correspondiente y se recomienda la batería de litio de batería de gran capacidad.
● La altura de acero magnético convencional de 10 pulgadas es solo C40, 12 pulgadas convencional es C45, no hay un valor fijo para el torque, que se puede ajustar de acuerdo con las necesidades del cliente.
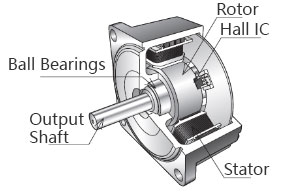
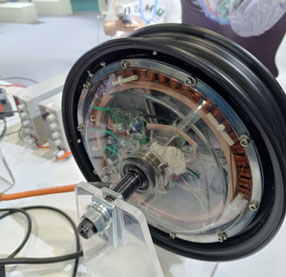
3. Componentes del motor
●Los componentes del motor: imanes, bobinas, sensores de pasillo, rodamientos, etc.. Cuanto mayor sea la potencia del motor, más imanes se necesitan (el sensor de la sala es el más probable que se rompa)
(Un fenómeno común de un sensor de salón roto es que el manillar y los neumáticos se atascan y no se pueden girar)
●La función del sensor Hall:Para medir el campo magnético y convertir el cambio en el campo magnético en una salida de señal (es decir, detección de velocidad)

Diagrama de composición del motor

Devanados de motor (bobinas), rodamientos, etc.

Núcleo del estator

Acero magnético

Sala
4. Modelo de motor y número de motor
El modelo del motor generalmente incluye el fabricante, voltaje, corriente, velocidad, potencia de potencia, número de versión del modelo y número de lotes. Debido a que los fabricantes son diferentes, la disposición y el marcado de los números también son diferentes. Algunos números de motor no tienen potencia, y el número de caracteres en el número de motor del vehículo eléctrico es incierto.
Reglas de codificación de número de motor comunes:
● Modelo de motor:WL4820523H18020190032, WL es el fabricante (Weili), batería de 48V, Serie Motor 205, 23h Magnet, producida el 1 de febrero de 2018, 90032 es el número del motor.
● Modelo de motor:AMTHI60/72 1200W30HB171011798, AMTHI es el fabricante (Anchi Power Technology), Battery Universal 60/72, potencia del motor 1200W, 30 h Magnet, producido el 11 de octubre de 2017, 798 puede ser el número de fábrica del motor.
● Modelo de motor:JYX968001808241408C30D, JYX es el fabricante (Jin Yuxing), la batería es de 96V, el potencia del motor es de 800 W, producida el 24 de agosto de 2018, 1408C30D puede ser el número de seral de fábrica único del fabricante.
● Modelo de motor:SW10 1100566, SW es la abreviatura del fabricante del motor (Lion King), la fecha de fábrica es el 10 de noviembre y 00566 es el número de serie natural (número motor).
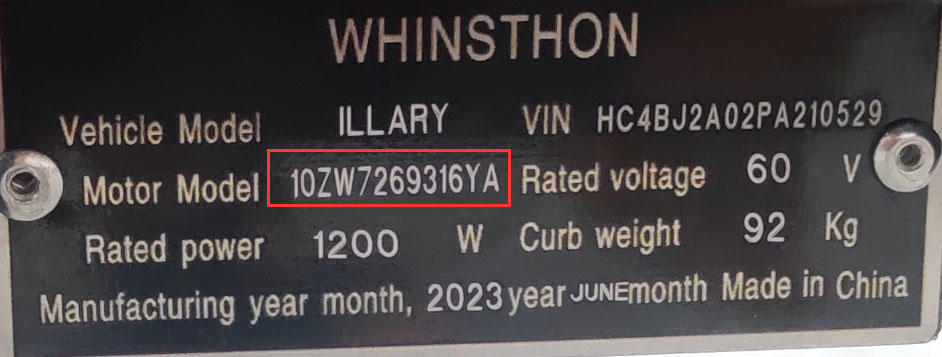
● Modelo de motor:10ZW6050315YA, 10 es generalmente el diámetro del motor, ZW es un motor de CC sin escobillas, la batería es de 60 V, 503 rpm, Torque 15, YA es un código derivado, YA, YB, YC se usan para distinguir diferentes motores con los mismos parámetros de rendimiento del fabricante.
● Número de motor:No existe un requisito especial, generalmente es un número digital puro o la abreviatura del fabricante + voltaje + potencia del motor + fecha de producción se imprime en el frente.
Modelo de motor
5. Tabla de referencia de velocidad
Motor ordinario
Baldoso
Motor de montaje en medio
| Motor de motocicleta eléctrica ordinario | Baldoso | Motor de montaje en medio | Observación |
| 600W-40 km/h | 1500W-75-80 km/h | 1500W-70-80 km/h | La mayoría de los datos anteriores son las velocidades realmente medidas por los automóviles modificados en Shenzhen, y se utilizan junto con los controles electrónicos correspondientes. A excepción del sistema Oppetein, el sistema Chaohu básicamente puede hacerlo, pero esto se refiere a la velocidad pura, no de potencia de escalada. |
| 800W-50 km/h | 2000w-90-100 km/h | 2000w-90-100 km/h | |
| 1000W-60 km/h | 3000W-1220-130 km/h | 3000W-1110-120 km/h | |
| 1500W-70 km/h | 4000W --130-140 km/h | 4000W-1220-130 km/h | |
| 2000w-80 km/h | 5000W-140-150 km/h | 5000W --130-140 km/h | |
| 3000W-95 km/h | 6000W-150-160 km/h | 6000W-140-150 km/h | |
| 4000W-1110 km/h | 8000W-180-190 km/h | 7000W-1550-160 km/h | |
| 5000W-20120 km/h | 10000W-200-220 km/h | 8000W-160-170 km/h | |
| 6000W --130 km/h | 10000W-180-200 km/h | ||
| 8000W-1550 km/h | |||
| 10000W-170 km/h |
6. Problemas motores comunes
6.1 El motor se enciende y apaga
● El voltaje de la batería se detendrá y comenzará cuando esté en el estado crítico de subvoltaje.
● Esta falla también ocurrirá si el conector de la batería tiene mal contacto.
● El cable de mango de control de velocidad está a punto de desconectarse y el interruptor de apagado de freno está defectuoso.
● El motor se detendrá y comenzará si el bloqueo de energía está dañado o tiene un contacto deficiente, el conector de línea está mal conectado y los componentes en el controlador no están soldados firmemente.
6.2 Al girar el mango, el motor se atasca y no puede girar
● La causa común es que el Motor Hall está roto, que no puede ser reemplazado por usuarios comunes y requiere profesionales.
● También puede ser que el grupo de bobina interna del motor esté quemada.
6.3 Mantenimiento común
● El motor con cualquier configuración debe usarse en la escena correspondiente, como la escalada. Si solo está configurado para una escalada de 15 °, la escalada forzada a largo plazo de una pendiente de más de 15 ° causará daños al motor.
● El nivel inferior al agua convencional del motor es IPX5, que puede resistir la pulverización de agua desde todas las direcciones, pero no se puede sumergir en el agua. Por lo tanto, si está lloviendo mucho y el agua es profunda, no se recomienda salir. Una es que habrá un riesgo de fuga, y el segundo es que el motor será inutilizable si está inundado.
● Por favor, no lo modifique en privado. La modificación de un controlador de alta corriente incompatible también dañará el motor.

