
Elektrischer Motorradmotor
1. Was ist ein Motor?
1.1 Der Motor ist eine Komponente, die Batteriestrom in mechanische Energie umwandelt, um die Räder eines Elektrofahrzeugs zum Drehen zu fahren
●Der einfachste Weg, um die Macht zu verstehen, besteht darin, zuerst die Definition von W, W = zu kennen, dh die Menge an Stromverbrauch pro Zeiteinheit, und die 48 -V, 60 -V und 72 V, über die wir häufig sprechen, sind die Gesamtmenge des Stromverbrauchs.
●Nehmen Sie beispielsweise 400 W, 800W, 1200W mit derselben Konfiguration, der gleichen Batterie und 48 -Spannung:
Zunächst hat das mit einem 400 -W -Motor ausgestattete Elektrofahrzeug unter der gleichen Fahrzeit eine größere Reichweite, da der Ausgangsstrom gering ist (Antriebsstrom klein), die Gesamtgeschwindigkeit des Stromverbrauchs ist gering.
Der zweite ist 800W und 1200 W. In Bezug auf Geschwindigkeit und Leistung sind Elektrofahrzeuge mit 1200 -W -Motoren schneller und leistungsfähiger. Dies liegt daran, dass je höher die Leistung ist, desto größer ist die Geschwindigkeit und die Gesamtmenge des Stromverbrauchs, aber gleichzeitig wird die Akkulaufzeit kürzer.
●Daher ist unter der gleichen V -Anzahl und -konfiguration der Unterschied zwischen Elektrofahrzeugen 400 W, 800W und 1200W in Strom und Geschwindigkeit.Je höher die Leistung, desto stärker die Kraft, desto schneller die Geschwindigkeit, desto schneller der Stromverbrauch und desto kürzer der Kilometerstand. Dies bedeutet jedoch nicht, dass je höher die Leistung ist, desto besser das Elektrofahrzeug. Es hängt immer noch von den tatsächlichen Bedürfnissen an sich selbst oder dem Kunden ab.
1.2 Die Arten von 2-Rad-Motoren mit Elektrofahrzeugen sind hauptsächlich unterteilt in: Hub-Motoren (häufig verwendet), mittelgroße Motoren (selten verwendet, durch Fahrzeugtyp geteilt)

Elektromotoren gewöhnlicher Motor

Elektrisches Motorrad mitten montiertem Motor
1.2.1 Die Struktur der Radnabenmotors ist hauptsächlich unterteilt in:DC -Motor gebürstet(im Grunde nicht verwendet),bürstenloser Gleichstrommotor(Gebldc),permanenter Magnetsynchronmotor(PMSM)
Der Hauptunterschied: ob es Bürsten gibt (Elektroden)
●Bürstenloser Gleichstrommotor (BLDC)(häufig verwendet),permanenter Magnetsynchronmotor(PMSM) (selten in zweirädrigen Fahrzeugen verwendet)
● Der Hauptunterschied: Die beiden haben ähnliche Strukturen, und die folgenden Punkte können verwendet werden, um sie zu unterscheiden:
Bürstenloser Gleichstrommotor
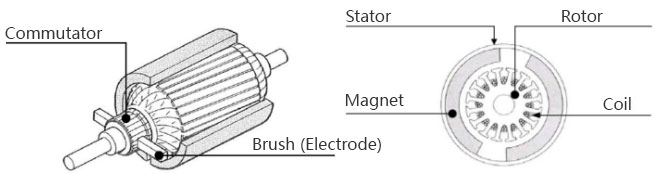
Gebürsteten Gleichstrommotor (wandelnd in DC umwandeln wird als Kommutator bezeichnet)
●Bürstenloser Gleichstrommotor (BLDC)(häufig verwendet),permanenter Magnetsynchronmotor(PMSM) (selten in zweirädrigen Fahrzeugen verwendet)
● Der Hauptunterschied: Die beiden haben ähnliche Strukturen, und die folgenden Punkte können verwendet werden, um sie zu unterscheiden:
| Projekt | Permanenter Magnetsynchronmotor | Bürstenloser Gleichstrommotor |
| Preis | Teuer | Billig |
| Lärm | Niedrig | Hoch |
| Leistung und Effizienz, Drehmoment | Hoch | Niedrig, leicht unterlegen |
| Controller -Preis- und Kontrollspezifikationen | Hoch | Niedrig, relativ einfach |
| Drehmomentpulsation (Beschleunigungsruck) | Niedrig | Hoch |
| Anwendung | High-End-Modelle | Mittelklasse |
● Es gibt keine Regulierung, die zwischen dem dauerhaften Magnetensynchronmotor und dem bürstenlosen Gleichstrommotor besser ist. Dies hängt hauptsächlich von den tatsächlichen Anforderungen des Benutzers oder des Kunden ab.
● Hub -Motoren sind unterteilt in:Gewöhnliche Motoren, Fliesenmotoren, wassergekühlte Motoren, flüssige Motoren und ölgekühlte Motoren.
●Gewöhnlicher Motor:herkömmlicher Motor
●Fliesenmotoren sind unterteilt in: 2./3./4./5. Generation, Fliesenmotoren der 5. Generation sind die teuersten, 3000W 5. Generation Fliesen Transit Motor -Marktpreis beträgt 2500 Yuan, andere Marken sind relativ billiger.
(Der elektroplierte Fliesenmotor ist besser ausgerichtet)
●Wassergekühlte/flüssiggekühlte/ölgekühlte MotorenAlle fügen Isolier hinzuFlüssigkeit im Innerender Motor zu erreichenKühlungWirkung und erweitern dieLebendes Motors. Die aktuelle Technologie ist nicht sehr ausgereift und ist anfällig fürLeckageund Misserfolg.
1.2.2 Mid-Motor: Mitte-Non-Gear, mittlerer Antrieb, Mittelkette/Gürtel
Gewöhnlicher Motor

Gewöhnlicher Motor

Flüssiger Motor
Ölgekühlter Motor
● Vergleich zwischen Hub-Motor und mittelgroßem Motor
● Die meisten Modelle auf dem Markt verwenden Hub-Hub-Motoren, und mittelgroße Motoren werden weniger verwendet. Es ist hauptsächlich durch Modell und Struktur geteilt. Wenn Sie das herkömmliche elektrische Motorrad mit Nabenmotor in einen mitten montierten Motor wechseln möchten, müssen Sie viele Orte wechseln, hauptsächlich den Rahmen und die flache Gabel, und der Preis wird teuer sein.
| Projekt | Herkömmlicher Hub -Motor | Mitten montierter Motor |
| Preis | Billig, moderat | Teuer |
| Stabilität | Mäßig | Hoch |
| Effizienz und Klettern | Mäßig | Hoch |
| Kontrolle | Mäßig | Hoch |
| Installation und Struktur | Einfach | Komplex |
| Lärm | Mäßig | Relativ groß |
| Wartungskosten | Billig, moderat | Hoch |
| Anwendung | Konventioneller Allgemeinzweck | High-End/Erfordert hohe Geschwindigkeit, Hügelklettern usw. |
| Bei Motoren der gleichen Spezifikationen sind die Geschwindigkeit und Leistung des mittelgroßen Motors höher als der des gewöhnlichen Nabenmotors, jedoch ähnlich dem Fliesen-Nabenmotor. | ||


2. Mehrere gemeinsame Parameter und Spezifikationen von Motoren
Mehrere häufige Parameter und Spezifikationen von Motoren: Volt, Leistung, Größe, Statorkerngröße, Magnethöhe, Geschwindigkeit, Drehmoment, Beispiel: 72 V10 Zoll 215C40 720R-2000W
● 72 V ist die Motorspannung, was mit der Batterie -Controller -Spannung übereinstimmt. Je höher die Basisspannung, desto schneller wird die Fahrzeuggeschwindigkeit.
● 2000W ist die Nennleistung des Motors. Es gibt drei Arten von Macht,nämlich Nennleistung, maximale Leistung und Spitzenleistung.
Nennleistung ist die Leistung, die der Motor für a laufen kannlangeunterNennspannung.
Maximale Leistung ist die Leistung, die der Motor für a laufen kannlangeunterNennspannung. Es ist das 1,15 -fache der Nennleistung.
Spitzenleistung ist dieMaximale Leistungdas dieDie Stromversorgung kann in kurzer Zeit erreichen. Es kann normalerweise nur für ungefähr dauern30 Sekunden. Das 1,4 -fache, das 1,5 -fache oder das 1,6 -fache der Nennleistung (wenn die Fabrik keine Spitzenleistung liefern kann, kann es als 1,4 -mal berechnet werden) 2000W × 1,4 -mal = 2800 W
● 215 ist die Statorkerngröße. Je größer die Größe ist, desto größer ist der Strom, der durchlaufen kann, und desto größer ist die Motorausgangsleistung. Der konventionelle 10-Zoll verwendet 213 (Multi-Wire-Motor) und 215 (Eindrahtmotor) und 12-Zoll beträgt 260; Elektrische Freizeitdreiräume und andere elektrische Dreiräder haben diese Spezifikation nicht und verwenden Hinterach -Motoren.
● C40 ist die Höhe des Magnetenund c ist die Abkürzung des Magneten. Es wird auch durch 40h auf dem Markt vertreten. Je größer der Magnet ist, desto größer ist die Leistung und das Drehmoment und desto besser die Beschleunigungsleistung.
● Der Magnet eines herkömmlichen 350-W-Motors beträgt 18 Stunden, 400W 22H, 500W-650 W 24 Stunden, 650 W-800W 27H, 1000W IS 30H und 1200 W sind 30H-35H. 1500W ist 35H-40H, 2000W ist 40H, 3000W 40H-45H usw. Da die Konfigurationsanforderungen jedes Autos unterschiedlich sind, unterliegt alles der tatsächlichen Situation.
● 720R ist die Geschwindigkeit, die Einheit istDrehzahlDie Geschwindigkeit bestimmt, wie schnell ein Auto fahren kann, und es wird mit einem Controller verwendet.
● Drehmoment, das Gerät ist n · m, bestimmt das Klettern und die Kraft eines Autos. Je größer das Drehmoment, desto stärker das Klettern und die Kraft.
Geschwindigkeit und Drehmoment sind umgekehrt proportional zueinander. Je schneller die Geschwindigkeit (Fahrzeuggeschwindigkeit), desto kleiner das Drehmoment und umgekehrt.
Wie man die Geschwindigkeit berechnet:Beispielsweise beträgt die Motordrehzahl 720 U / min (es wird eine Schwankung von etwa 20 U / min geben). Der Umfang eines 10-Zoll-Reifens eines General-Elektrofahrzeugs beträgt 1,3 Meter (kann basierend auf Daten berechnet werden). Das Overspeed-Verhältnis des Controllers beträgt 110%(das Überschwemmungsverhältnis des Controllers (das Überschwingungsverhältnis des Controllers) im Allgemeinen 110%-115%)
Die Referenzformel für die Zweiradgeschwindigkeit lautet:Geschwindigkeit*Controller Overspeed -Verhältnis*60 Minuten*Reifenumfang, das heißt (720*110%)*60*1,3 = 61,776, was in 61 km/h umgewandelt wird. Bei der Last beträgt die Geschwindigkeit nach der Landung etwa 57 km/h (ca. 3-5 km/h weniger) (die Geschwindigkeit wird in Minuten berechnet, also 60 Minuten pro Stunde), sodass die bekannte Formel auch verwendet werden kann, um die Geschwindigkeit umzukehren.
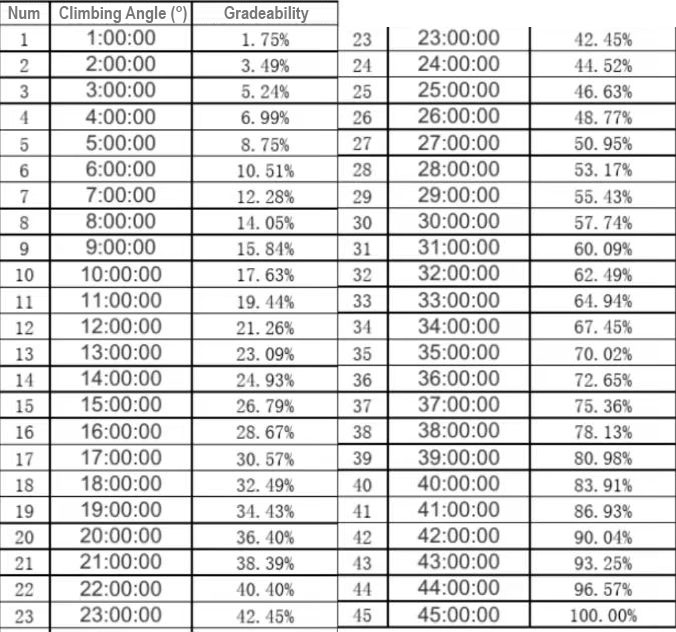
Das Drehmoment in N · m bestimmt die Kletterfähigkeit und -leistung eines Fahrzeugs. Je größer das Drehmoment ist, desto größer ist die Kletterfähigkeit und Kraft.
Zum Beispiel:
● 72V12 Zoll 2000 W/260/C35/750 U/min/Drehmoment 127, maximale Geschwindigkeit 60 km/h, zwei Personen Klettersteigung von etwa 17 Grad.
● müssen mit dem entsprechenden Controller übereinstimmen und die Batterie-Lithium-Batterie mit großer Kapazität wird empfohlen.
● 72 V10 Zoll 2000W/215/C40/720 U/min/Drehmoment 125, maximale Geschwindigkeit 60 km/h, Klettersteigung von etwa 15 Grad.
● 72V12 Zoll 3000W/260/C40/950 U/min/Drehmoment 136, Maximale Geschwindigkeit 70 km/h, Klettersteigung von etwa 20 Grad.
● müssen mit dem entsprechenden Controller übereinstimmen und die Batterie-Lithium-Batterie mit großer Kapazität wird empfohlen.
● 10-Zoll-herkömmliche magnetische Stahlhöhe ist nur C40, 12-Zoll-konventionelle IS C45, es gibt keinen festen Wert für das Drehmoment, der entsprechend den Kundenbedürfnissen angepasst werden kann.
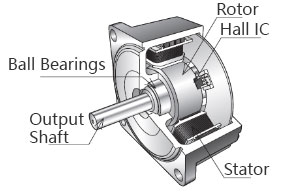
3. Motorkomponenten
●Die Komponenten des Motors: Magnete, Spulen, Hallsensoren, Lager usw.. Je größer die Motorleistung, desto mehr Magnete werden benötigt (der Hallsensor ist am wahrscheinlichsten, der am wahrscheinlichsten brechen)
(Ein gemeinsames Phänomen eines gebrochenen Hallsensors ist, dass der Lenker und Reifen stecken bleiben und nicht gedreht werden können)
●Die Funktion des Hallsensors:Um das Magnetfeld zu messen und die Änderung des Magnetfelds in einen Signalausgang umzuwandeln (dh Geschwindigkeitserfassung)

Motorzusammensetzungsdiagramm

Motorwicklungen (Spulen), Lager usw.

Statorkern

Magnetstahl

Saal
4. Motormodell und Motorummer
Das Motormodell umfasst im Allgemeinen Hersteller, Spannung, Strom, Geschwindigkeit, Stromnetz, Modellversionsnummer und Chargennummer. Da die Hersteller unterschiedlich sind, sind auch die Anordnung und Markierung der Zahlen unterschiedlich. Einige motorische Zahlen haben keine Stromnutzung, und die Anzahl der Zeichen in der Motorzahl des Elektrofahrzeugs ist ungewiss.
Common Motor Number Codierungsregeln:
● Motormodell:WL4820523H18020190032, WL ist der Hersteller (WEILI), Batterie 48 V, Motor 205 Series, 23H Magnet, der am 1. Februar 2018, 90032 hergestellt wurde, ist die Motorzahl.
● Motormodell:AMTHI60/72 1200W30HB171011798, Amthi ist der Hersteller (Anchi Power Technology), Battery Universal 60/72, Motorwattage 1200W, 30H Magnet, der am 11. Oktober 2017, 798 hergestellt wurde, ist möglicherweise die Motor -Fabrik -Nummer.
● Motormodell:Jyx968001808241408c30d, Jyx ist der Hersteller (Jin Yuxing), der Akku ist 96 V, die Motorwätte beträgt 800 W, hergestellt am 24. August 2018, 1408c30d.
● Motormodell:SW10 1100566, SW ist die Abkürzung des Motorherstellers (Lion King), das Fabrikdatum ist der 10. November, und 00566 ist die natürliche Seriennummer (Motorummer).
● Motormodell:10 zw6050315ya, 10 ist im Allgemeinen der Durchmesser des Motors, zW ist ein bürstenloser Gleichstrommotor, die Batterie ist 60 V, 503 U / min, Drehmoment 15, YA ist ein abgeleiteter Code, Ya, YB, YC, um Differenzmotoren mit den gleichen Leistungsparametern vom Hersteller zu unterscheiden.
● Motorummer:Es gibt keine besondere Anforderung, im Allgemeinen handelt es sich um eine reine digitale Nummer oder die Abkürzung des Herstellers + Spannung + Motorleistung + Produktionsdatum werden vorgeschlagen.
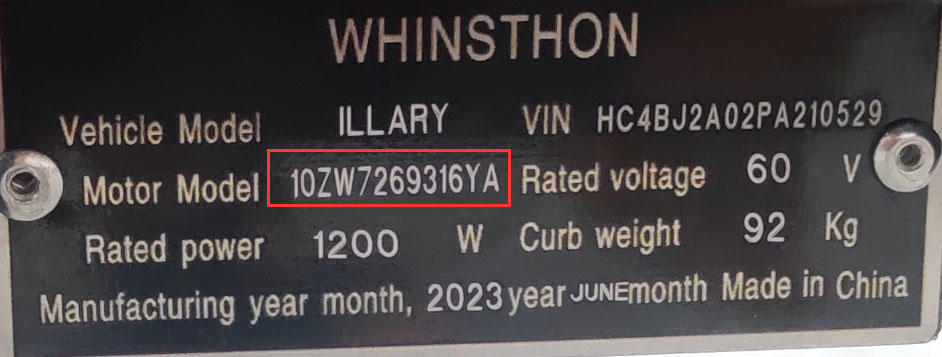
Motormodell
5. Geschwindigkeitsreferenztabelle
Gewöhnlicher Motor
Fliesenmotor
Mitten montierter Motor
| Normaler elektrischer Motorradmotor | Fliesenmotor | Mitten montierter Motor | Bemerkung |
| 600W-40 km/h | 1500W-75-80 km/h | 1500W-70-80 km/h | Die meisten der oben genannten Daten sind die tatsächlich gemessenen Geschwindigkeiten, die von modifizierten Autos in Shenzhen gemessen werden und in Verbindung mit entsprechenden elektronischen Steuerungen verwendet werden. Mit Ausnahme des Oppein -Systems kann das Chaohu -System es im Grunde genommen tun, aber dies bezieht sich auf reine Geschwindigkeit und nicht auf Kletterkraft. |
| 800W-50 km/h | 2000W-90-100 km/h | 2000W-90-100 km/h | |
| 1000 W--60 km/h | 3000W-120-130 km/h | 3000W-110-120 km/h | |
| 1500 W- 70 km/h | 4000W-130-140 km/h | 4000W-120-130 km/h | |
| 2000W-80 km/h | 5000W-140-150 km/h | 5000W-130-140 km/h | |
| 3000W-95 km/h | 6000W-150-160 km/h | 6000W-140-150 km/h | |
| 4000W-110 km/h | 8000W- 180-190 km/h | 7000W-150-160 km/h | |
| 5000W-120 km/h | 10000W-200-220 km/h | 8000W-160-170 km/h | |
| 6000W-130 km/h | 10000W- 180-200 km/h | ||
| 8000 W--1550 km/h | |||
| 10000W-170 km/h |
6. Häufige motorische Probleme
6.1 Der Motor schaltet ein und aus
● Die Batteriespannung stoppt und beginnt, wenn sie sich im kritischen Unterspannungszustand befindet.
● Dieser Fehler tritt auch auf, wenn der Batterieanschluss einen schlechten Kontakt hat.
● Der Drahtgriff des Geschwindigkeitsregelungsgriffs wird kurz vor dem Tremsen und des Bremsschalters fehlerhaft sein.
● Der Motor stoppt und beginnt, wenn die Stromverriegelung beschädigt ist oder schlechte Kontakte aufweist, der Linienstecker schlecht angeschlossen ist und die Komponenten im Controller nicht fest beschweißt werden.
6.2 Beim Drehen des Griffs steckt der Motor fest und kann sich nicht drehen
● Die übliche Ursache ist, dass die Motorhalle gebrochen ist, was nicht durch normale Benutzer ersetzt werden kann und Fachleute erfordert.
● Es kann auch sein, dass die interne Spulengruppe des Motors ausgebrannt ist.
6.3 Häufige Wartung
● Der Motor mit einer beliebigen Konfiguration sollte in der entsprechenden Szene wie Klettern verwendet werden. Wenn es nur für das Klettern von 15 ° konfiguriert ist, verursacht das langfristige erzwungene Aufstieg einer Steigung von mehr als 15 ° den Motor beschädigt.
● Der herkömmliche wasserdichte Niveau des Motors beträgt IPX5, der dem Wassersprühen aus allen Richtungen standhalten kann, aber nicht in Wasser eingetaucht werden kann. Wenn es stark regnet und das Wasser tief ist, wird nicht empfohlen, herauszufahren. Eine davon ist, dass es das Risiko von Leckagen besteht, und der zweite ist, dass der Motor unbrauchbar ist, wenn er überflutet ist.
● Bitte ändern Sie es nicht privat. Durch das Ändern eines inkompatiblen Hochstromplulierers wird auch der Motor beschädigt.

